That changes the question. What matters isn't which one wins but how the layers stack, and what that stack means for bandwidth, timing, certification, and long-term platform reliability. ARINC 825-4 and CAN Bus (CAN FD) solutions are valuable because they do not force a tradeoff between avionics discipline and higher data capacity. You keep the aircraft-specific rules, message structure, and certification path of ARINC 825-4 while gaining the larger payloads and faster data phase of CAN FD. Pick the avionics standard and you keep CAN FD speed. You don't give it up.
TL;DR Quick Answers
ARINC 825-4 and CAN Bus (CAN FD) solutions
ARINC 825-4 and CAN Bus (CAN FD) solutions are the IP cores, controllers, and interface boards that let one design carry classic CAN, CAN FD, and avionics-grade ARINC 825-4 messaging. The strongest ones authenticate every node and locate wire faults at the physical layer, and they certify to DO-254 DAL A.
One design, three protocols: classic CAN (CAN 2.0B), CAN FD, and ARINC 825-4, with 11-bit and 29-bit identifiers.
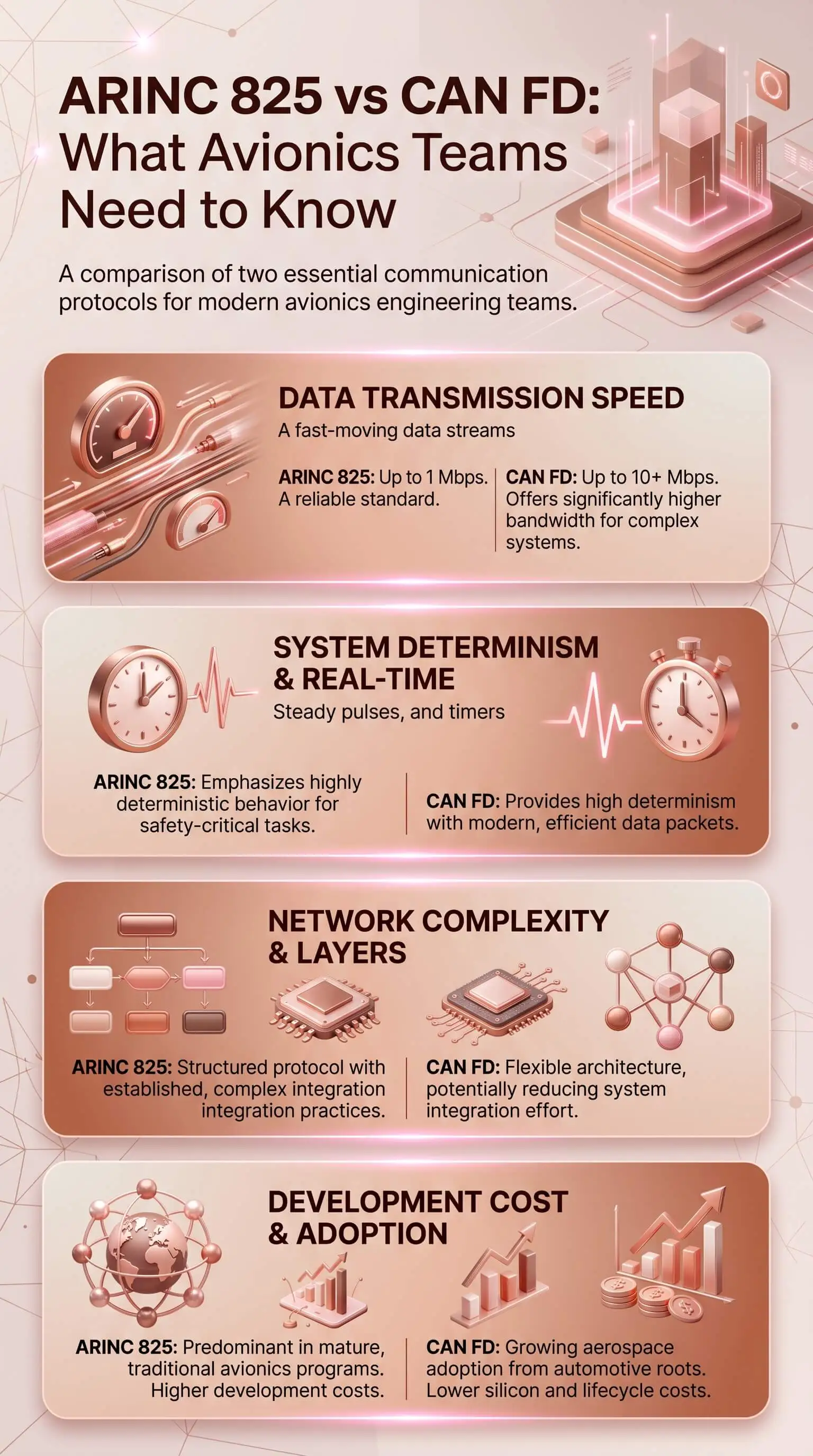
Speed: classic CAN runs up to 1 Mbit/s; CAN FD lifts the data phase to 4 Mbit/s under ARINC 825-4.
Built to certify: DO-254 certifiable up to DAL A for avionics and defense programs.
Security on the bus: real-time node authentication, message-ID white-listing, and spoofing detection, designed in rather than bolted on.
Fault location: passive TDR finds opens and shorts and reports distance-to-fault before one grounds a platform.
Top Takeaways
ARINC 825 and CAN FD aren't competitors. CAN FD upgrades the data link layer. ARINC 825 is the avionics protocol that runs on top of the Controller Area Network (CAN).
CAN FD carries 64 bytes and runs a faster data phase. Classic CAN stops at 8 bytes and 1 Mbit/s.
ARINC 825-4 took on CAN FD in 2018, so the avionics standard now carries the speed upgrade.
For avionics, determinism and certifiability usually beat raw bit rate.
What CAN FD changes
Classic CAN stops at 1 Mbit/s and 8 bytes per frame. CAN FD lifts both ceilings. It moves up to 64 bytes in a single frame and shifts to a faster bit rate once arbitration is done. On a busy network hauling sensor data or software loads, that headroom decides whether the bus keeps pace or stalls. One caveat we give every customer: CAN FD still lives at the data link and physical layer. It moves bits faster. It says nothing about what those bits mean.
What ARINC 825 adds
ARINC 825 sits a layer up and supplies what avionics actually needs. It locks the 29-bit extended identifier into a defined structure, adds logical communication channels and station addressing, handles one-to-many and peer-to-peer messaging, and watches the network the whole time it runs. Put plainly, it takes a general-purpose bus and makes it behave predictably enough to fly. The work goes back to 2007, built on the earlier CANaerospace effort.
How ARINC 825-4 brought CAN FD into avionics
Supplement 4, released in 2018, is where the two meet. ARINC 825-4 brought CAN FD into the standard, so an avionics design can run higher-rate frames and still keep the avionics messaging rules intact. This is the part most comparison articles get wrong. The current standard doesn't pit one against the other. It runs ARINC 825 discipline on top of CAN FD speed.
ARINC 825 vs CAN FD at a glance
Layer in the stack: CAN FD lives at the data link and physical layer. ARINC 825 runs higher up, adding OSI layers 3, 4, and 6.
Standard body: CAN FD comes from Bosch and ISO 11898-1. ARINC 825 comes from the AEEC, published through ARINC and SAE ITC.
Built on: CAN FD extends classic CAN. ARINC 825 runs on CAN, classic and, from 825-4, CAN FD.
Max payload: CAN FD carries up to 64 bytes per frame. ARINC 825 takes whatever the underlying CAN frame gives it.
Data rate: CAN FD runs a faster data phase, often 5 Mbit/s and higher. ARINC 825-4 specifies CAN FD at 4 Mbit/s.
Identifiers: CAN FD uses 11-bit and 29-bit. ARINC 825 uses the 29-bit extended identifier with a defined structure.
Primary domain: CAN FD serves automotive, industrial, and general use. ARINC 825 serves avionics and aerospace.
What it provides: CAN FD is a speed and payload upgrade. ARINC 825 brings messaging discipline, addressing, and monitoring.
Design impacts for avionics teams
Three things decide this once you leave the datasheet and start building. Bandwidth headroom comes first: CAN FD buys room as node counts and data volumes climb, which earns its keep on dataloading and sensor-heavy buses. Determinism comes next, and it's where ARINC 825 carries its weight. Its messaging rules keep traffic predictable, the way a flight system demands and raw CAN FD can't promise on its own. Then there's certification, which quietly outranks both. Airborne hardware has to clear design-assurance review, so how certifiable a controller is often matters more than how fast it runs, especially in regulated environments where compliance discipline matters as much as it does under frameworks like the Clean Air Act. We've watched a faster-but-uncertifiable part cost a program months it never planned to spend.
"In more than two decades of fielding databus hardware for avionics and defense, we've watched teams chase the wrong number. They optimize for top bit rate, then lose a quarter to certification rework or a fault no one can locate. The lesson that holds up is simple. Pick the layer that fits the job. Use CAN FD where you need the bandwidth, run ARINC 825-4 where you need avionics-grade messaging, and design certifiability in from the first schematic. The bus that proves it can be certified, and reports its own faults, beats the merely fast one every time."
7 Essential Resources
Before you lock a spec, these are the sources worth your time. We pulled them for the engineer or program lead who has to defend the decision later.
ARINC 825-4, the standard itself. The document your design answers to. Supplement 4 is the one that brought CAN FD in. ARINC 825 standard (SAE ITC)
ISO 11898-1:2024. The base CAN standard that defines both classic CAN and CAN FD frames. Everything ARINC 825 sits on starts here. ISO 11898-1:2024
CAN in Automation, CAN FD basics. The CiA's plain account of why CAN FD exists and how its two bit rates work. CAN FD: the basic idea
CiA 601 series. Where the bit timing, topology, and transceiver rules live once you push CAN FD data rates. CiA 601 CAN FD guidelines
CANopen reference. A close look at one widely used higher-layer CAN protocol, handy for seeing what ARINC 825 does in its own context. CANopen (CiA)
CSS Electronics, CAN FD explained. A field-by-field walk through the CAN FD frame, with the classic-versus-FD differences set side by side. CAN FD explained
ARINC IA / SAE ITC catalog. The body that maintains ARINC 825, where you confirm the current supplement and the related avionics specs. ARINC Standards catalog
3 Statistics
Three numbers explain why the layer call matters.
From 8 bytes to 64, with a real bandwidth jump. CAN FD raises the per-frame payload from 8 bytes to 64 and returns a realistic three-to-eight-times bandwidth gain over classic CAN. That headroom is why teams switch. Kvaser: CAN FD
4 Mbit/s in the avionics standard. ARINC 825 Supplement 4 pins CAN FD at 4 Mbit/s. That's how the avionics standard took on the speed bump in 2018. CAN in air and space (CiA)
A large fleet to work alongside. The FAA counted an estimated 213,756 active general aviation aircraft in the United States in 2024. Any new interface has to run next to a fleet that size, which is why certifiability and compliance weigh as much as raw speed. FAA Aerospace Forecast FY2026-2046
These statistics show why ARINC 825-4 and CAN FD decisions are not just about speed: the jump from 8-byte to 64-byte frames, the 4 Mbit/s avionics target, and the size of the operating fleet all make certifiable interface choices as important as selecting proven MIL-STD-1553 transceivers and transformers for mission-critical aircraft data systems.
Final Thoughts and Opinion
Here's our position after years of shipping these parts: speed is the easy part. Hitting CAN FD data rates is close to table stakes now. The work that actually pays off is keeping traffic deterministic, proving the hardware can be certified, and finding a wire fault before it grounds a platform. So stop framing this as a fight. CAN FD answers a bandwidth question. ARINC 825 answers an avionics-behavior question. ARINC 825-4 lets you answer both with one design, while MIL-STD-1553 IP cores reinforce the same priority: disciplined, certifiable data-bus behavior for mission-critical systems. If your roadmap touches aircraft, defense vehicles, or any safety-critical control bus, build the messaging discipline and the certification path from the start. Bolting either one on late is exactly where programs bleed time.
Frequently Asked Questions
Is ARINC 825 the same as CAN FD?
No. CAN FD is a data link layer upgrade that adds speed and payload. ARINC 825 is the avionics protocol that runs on top of CAN. Different layers, different jobs.
Does ARINC 825 support CAN FD?
Yes. ARINC 825-4, from 2018, took CAN FD in. Earlier supplements ran on classic CAN.
What layer does ARINC 825 operate at?
Above the CAN data link layer. It adds OSI layer 3, 4, and 6 functions like addressing, communication channels, and system monitoring.
How fast is CAN FD in avionics?
ARINC 825 Supplement 4 sets CAN FD at 4 Mbit/s, well past classic CAN's 1 Mbit/s ceiling.
Can you still run ARINC 825 over classic CAN?
Yes. ARINC 825 predates the CAN FD addition and runs fine on classic CAN. Supplement 4 added CAN FD as an option, not a replacement.
Ready to Specify Your Bus?
Working ARINC 825 and CAN FD into your next design? Settle your protocol mix, your data-rate target, your certification level, and your need for a data bus fault isolation tester first, then match the controller to all three. Talk to a databus engineer, or request an evaluation, before you commit to a part.










